





роботизированная контактная сварка
Когда слышишь ?роботизированная контактная сварка?, первое, что приходит в голову — идеальная автоматизация, безупречные швы и полное отсутствие человеческого фактора. Это, пожалуй, самый распространённый миф. На деле, робот — это всего лишь очень точная рука, а голова, принимающая решения о силе тока, давлении, времени выдержки и траектории, по-прежнему должна принадлежать человеку с опытом. Особенно это чувствуется в строительно-монтажном секторе, где каждая деталь уникальна, а объёмы партий не всегда гигантские. Вот, к примеру, в нашей работе по стальным конструкциям для ООО ?Яньтай Байчэн Строительно-монтажный инжиниринг? (подробнее о спектре услуг можно на bcjz.ru) мы сталкиваемся именно с этим: заказчику нужна прочность, скорость и соблюдение ГОСТ, а не красивая картинка с танцующим манипулятором.
Почему робот? Конкретика вместо рекламы
Решение внедрить роботизированную сварку у нас назревало давно, но толчком стал конкретный проект — каркас складского комплекса. Там были километры однотипных тавровых швов на соединениях балок. Вручную — это монотонно, утомительно и, главное, сложно выдержать стабильность. Варишь первый час идеально, к третьему уже усталость сказывается, а к концу смены возможны огрехи. Робот же, будучи однажды обученным, повторяет цикл с точностью до миллиметра и секунды. Но обучение — это отдельная история.
Мы остановились на комплексе с шестиосевым манипулятором и источником тока средней мощности. Не самый навороченный на рынке, но надёжный. Ключевым было не ?имя?, а возможность тонко настраивать программы под разные толщины металла и пространственные положения. Сразу скажу: волшебной кнопки ?Сварить балку? нет. Каждую новую деталь, особенно сложной конфигурации, приходится программировать заново, и это время, которое многие не учитывают в смете.
Ошибкой было бы думать, что робот заменит всех сварщиков. Он заменил их на самых рутинных операциях. Зато высвободил наших лучших специалистов для более ответственных участков — сварки узлов в монтажных условиях на объекте, там, где робота не поставишь. Получился симбиоз: цеховая контактная сварка на роботе обеспечивает стабильное качество заготовок, а монтажники на объекте собирают их в конструкцию, доводя швы вручную. Такой подход отражён и в деятельности ООО ?Яньтай Байчэн?, где специализированный подряд на стальные конструкции логично дополняется собственным производством металлоконструкций — теперь уже с элементом роботизации.
Подводные камни, о которых не пишут в брошюрах
Самая большая проблема — подготовка кромок. Робот туп. В хорошем смысле. Он запрограммирован на идеальную геометрию стыка. Если сборщик где-то дал зазор в 2 мм вместо 1 мм, или кромка с заусенцем, робот не станет, как человек-сварщик, интуитивно менять угол горелки или скорость. Он тупо пройдёт по заданной траектории, и брак гарантирован. Пришлось ужесточить контроль подготовки деталей, что, впрочем, пошло на пользу всей культуре производства.
Вторая головная боль — доступность. Манипулятор не всеяден. Есть ?мёртвые зоны?, куда он физически не дотянется или не развернёт горелку под нужным углом. При проектировании узлов, которые планируется варить роботом, это надо учитывать с самого начала. Однажды мы уже спроектировали красивый узел, а потом полдня ломали голову, как запрограммировать к нему доступ. В итоге переделали чертёж — разделили узел на две более простые сборочные единицы.
И третье — расходники. Казалось бы, мелочь. Но роботизированная сварка чувствительна к качеству контактных наконечников, подающих проволоку механизмов. Износ идёт быстрее, чем при ручной, потому что процесс непрерывный. Закупка ?что подешевле? вышла боком: начались сбои в подаче проволоки, шов ложился рывками. Вернулись к проверенным дорогим расходникам — и себестоимость в итоге даже снизилась за счёт отсутствия простоев и переделок.
Кейс из практики: когда автоматизация дала сбой
Хочется рассказать и о провале, чтобы картина была полной. Был заказ на серию перфорированных кронштейнов из тонколистовой стали. Идеально подходит для робота, думали мы. Написали программу, сделали пробную партию — внешне всё прекрасно. Но при испытаниях на отрыв несколько швов пошли трещиной именно по границе сплавления.
Стали разбираться. Оказалось, из-за частых перфораций в листе теплоотвод был неравномерным. Робот, двигаясь с постоянной скоростью, в одних зонах давал идеальный прогрев, а в других, возле отверстий, металл остывал быстрее, и происходило так называемое ?непроваривание?. Человек бы, видя изменение цвета металла, подсознательно замедлился. Роботу же нужны чёткие команды. Пришлось вносить в программу коррективы по скорости на конкретных участках траектории, основываясь на тепловой карте детали. Это был ценный урок: роботизированная сварка требует не менее глубокого, а порой и более детального понимания физики процесса, чем ручная.
В итоге кронштейны мы сдали, но сроки сдвинулись. Зато теперь у нас в базе есть программа с переменными параметрами, которая пригодилась для похожих деталей в других проектах, в том числе и при производстве строительных механизмов, которое также ведёт наша компания.
Интеграция в общий процесс: не остров, а часть конвейера
Важный момент — робот не должен быть ?игрушкой в углу цеха?. Его работа должна быть встроена в технологическую цепочку. У нас он стоит после участка резки и гибки и перед участком очистки и окраски. Данные для программы (тип детали, её геометрия) теперь закладываются технологами ещё на этапе выпуска чертежей. Это дисциплинирует.
Для таких комплексных задач, как генеральный подряд, где нужно координировать множество процессов, наличие такого точного и предсказуемого звена, как роботизированная сварка в цеху, упрощает планирование. Мы точно знаем, сколько времени займёт изготовление той или иной партии металлоконструкций, и можем чётче формировать график поставок на объект. Это напрямую касается и продажи металлоконструкций — мы можем дать заказчику более точные сроки и гарантии по качеству сварных соединений.
Но и здесь не без нюансов. Переход с одной номенклатуры на другую требует времени на переналадку. Если заказ на 50 однотипных балок — робот вне конкуренции. Если нужно сделать поштучно 10 разных узлов — часто быстрее и экономичнее отдать это вручную опытному сварщику. Поэтому планирование загрузки роботизированной ячейки — это постоянный баланс между эффективностью и гибкостью.
Взгляд вперёд: что дальше?
Сейчас мы смотрим в сторону систем технического зрения. Это следующий логичный шаг. Чтобы робот мог сам адаптироваться к небольшим погрешностям в сборке, распознавать стык и корректировать траекторию в реальном времени. Пока это дорогое удовольствие, но для некоторых сложных изделий, которые мы производим, возможно, оно того стоит. Особенно если говорить о проектах, где требования к сварным швам экстремально высоки.
Другое направление — более тесная интеграция с САПР. Чтобы программа для роботизированной контактной сварки генерировалась почти автоматически на основе 3D-модели узла. Это сократит время подготовки производства для нестандартных изделий, которые часто требуются в строительном инжиниринге.
В итоге, возвращаясь к началу. Роботизированная контактная сварка — это мощный, но всего лишь инструмент. Его эффективность определяет не яркость брошюры, а глубина понимания технолога, качество подготовки производства и умение вписать этот инструмент в живую, иногда неидеальную, реальность цеха или строительной площадки. Как и любой сложный механизм в строительстве, будь то кран или сварочный робот, он требует не слепого восхищения, а грамотной и взвешенной эксплуатации. И тогда он действительно начинает приносить ту самую пользу — в качестве, скорости и, в конечном счёте, в надёжности тех самых металлоконструкций, из которых потом вырастают здания и сооружения.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
 Второстепенные стальные элементы
Второстепенные стальные элементы -
 Второстепенные стальные элементы4
Второстепенные стальные элементы4 -
 Ограждающая конструкция2
Ограждающая конструкция2 -
 Трехслойные панели с металлическими обшивками
Трехслойные панели с металлическими обшивками -
 Второстепенные стальные элементы3
Второстепенные стальные элементы3 -
 Ограждающая конструкция
Ограждающая конструкция -
 Основные несущие стальные элементы2
Основные несущие стальные элементы2 -
 Основные несущие стальные элементы4
Основные несущие стальные элементы4 -
 Ограждающая конструкция4
Ограждающая конструкция4 -
 Портальная стальная рама
Портальная стальная рама -
 Основные несущие стальные элементы
Основные несущие стальные элементы -
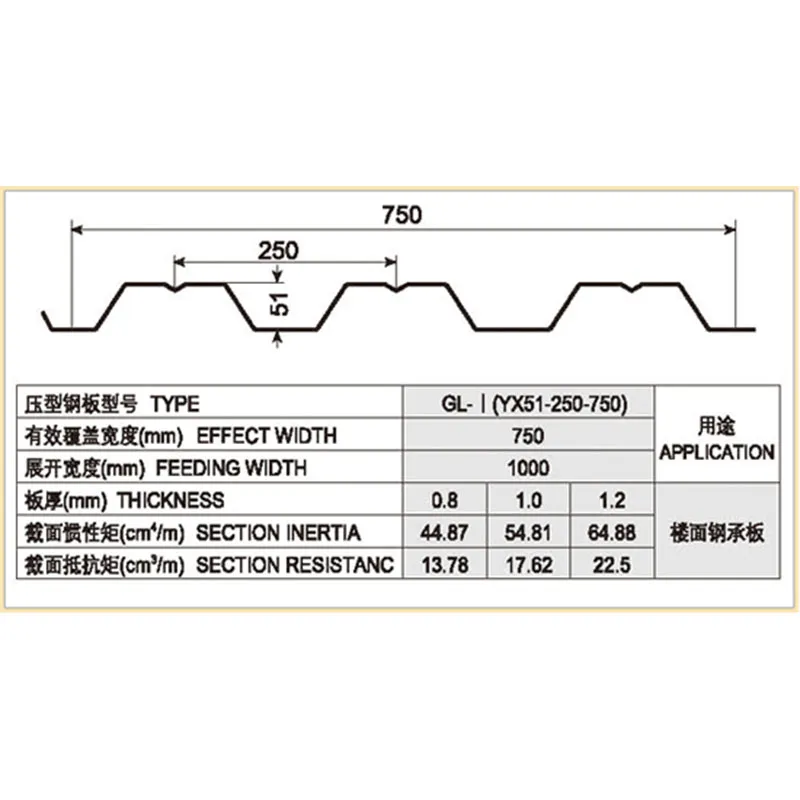 Профилированный настил
Профилированный настил